- 靈活越障、花樣空翻 騰訊輪腿式機器人亮相機器人頂會ICRA
國際在線消息:6月3日,騰訊輪腿式機器人Ollie(奧利)正式亮相。它像一個靈活的“輪滑小子”,能完成跳躍、360度空翻等高難度動作。
騰訊輪腿式機器人Ollie(奧利)
輪腿式機器人(wheel-legged robot)是近年來機器人研究的前沿領域。Ollie兼具輪式結構和腿部能力,輪式結構移動快、效率高;腿部能力讓Ollie適應不平地面、完成跳躍臺階等動作,達到了行業領先水準。
這是騰訊Robotics X實驗室新型機器人。在自平衡自行車、機器狗Jamoca和Max之後,Ollie積累了實驗室的移動控制技術,並在運動規劃、平衡與穩定性上重點突破,成為實驗室又一大創新成果。
在日前舉辦的ICRA 2021,騰訊AI Lab及Robotics X實驗室主任張正友受邀作大會報告,介紹了Robotics X實驗室在機器人移動研究領域的佈局與進展,並分享了Ollie的技術細節。
跳躍、360度空翻也能輕鬆搞定
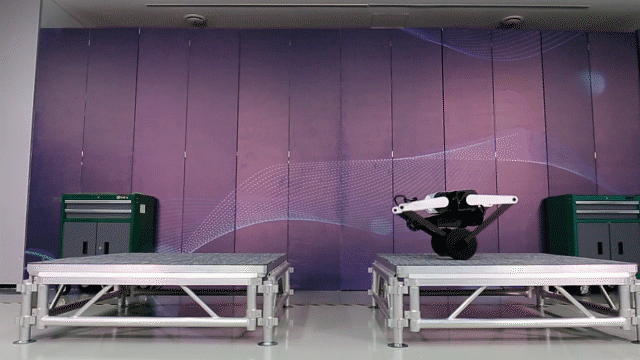
要讓機器人應對複雜地形,跳躍能力不可或缺。最低身高只有35釐米的Ollie,可以跳上40釐米的臺階,豎直起跳高度最高可達60釐米,甚至能輕鬆完成360度空翻挑戰;在平地上時,Ollie更像是一個“不倒翁”,能抗住各種“突發”狀況。
騰訊輪腿式機器人Ollie(奧利)
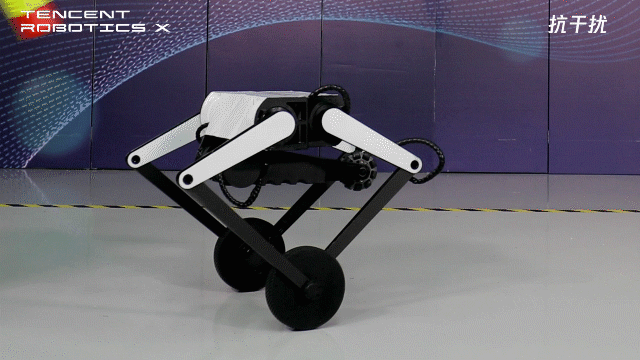
Ollie的機械設計大有玄機:單腿採用並連線構,與身體形成五連桿結構,使整體具有結構簡單、動態性能高、爆發力強的特點;“尾巴”的獨特設計一方面為Ollie提供額外角動量,助其完成更高動態運動,如空翻。同時“尾巴”可充當第三條腿,增加穩定性,為搭載機械臂完成更多任務提供可能。
出色的運動能力,高動態高難度的空翻動作背後,源於騰訊Robotics X實驗室的最新研究進展:非線性控制技術、全身動力學控制和軌跡規劃。
非線性控制技術讓機器人具備良好的平衡能力,此前實驗室研發的自平衡自行車已應用同類技術,在靜止及行進狀態下均保持平衡不倒。
針對輪腿式機器人的形態和特點,實驗室研發團隊適應性地應用非線性控制方法,控制器不再受限于模型的可線性化區間內,使機器人Ollie在大角度傾斜時具有良好的平衡能力和魯棒性(Robust音譯,指在異常和危險情況下系統生存的能力)。
在雙輪模式下,機器人與地面只有兩個接觸點,對平衡能力要求更高。在變換身高過不平整地面、甚至單腿過障礙時,Ollie都能完美保持平衡。
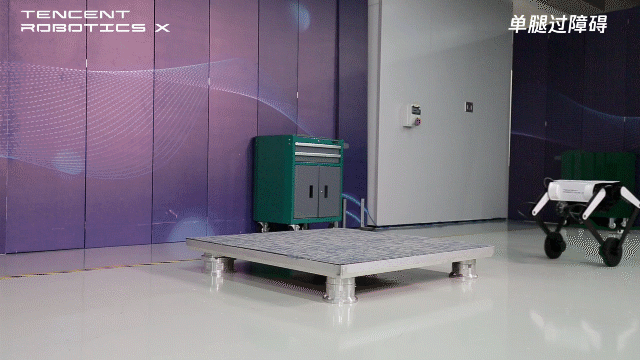
騰訊輪腿式機器人Ollie(奧利)
全身動力學控制像給Ollie裝上了發達的“小腦”,其採用最優化方法求得各關節力矩來實現全身姿態調整,不僅能讓它實現更有挑戰的運動,並在面對突如其來的巨大衝擊如在空翻落地和遇到碰撞時,Ollie能“以柔克剛”,順利抵抗外界干擾,保持平衡。
除了平衡能力之外,Ollie擁有軌跡規劃能力。在完成這些動作時,Ollie要動用自己的“大腦”提前“想好”運動軌跡,即如何應用自身的形態和結構特點,最大程度地發揮關節電機性能來實現目標運動。
Ollie以全身動力學模型為基礎,將整個跳躍或空翻過程分解為起跳、飛行、落地三個階段,通過優化手段得到完成整個運動的關節電機位置、速度和關節力矩的參考值序列。
Robotics X移動能力再突破 論文入選機器人頂會ICRA
騰訊Robotics X實驗室主攻移動、靈巧操作和智慧體三大機器人核心通用技術的研究與應用。其中,移動能力被認為是機器人最核心、最基本的能力之一。
實驗室移動技術框架包含機械設計、感知、運動規劃及控制,以及融合這三者的整機系統設計與搭建等四大模組,他們分別可理解為機器人的軀幹、眼睛、大腦,以及各“器官”協調的能力。
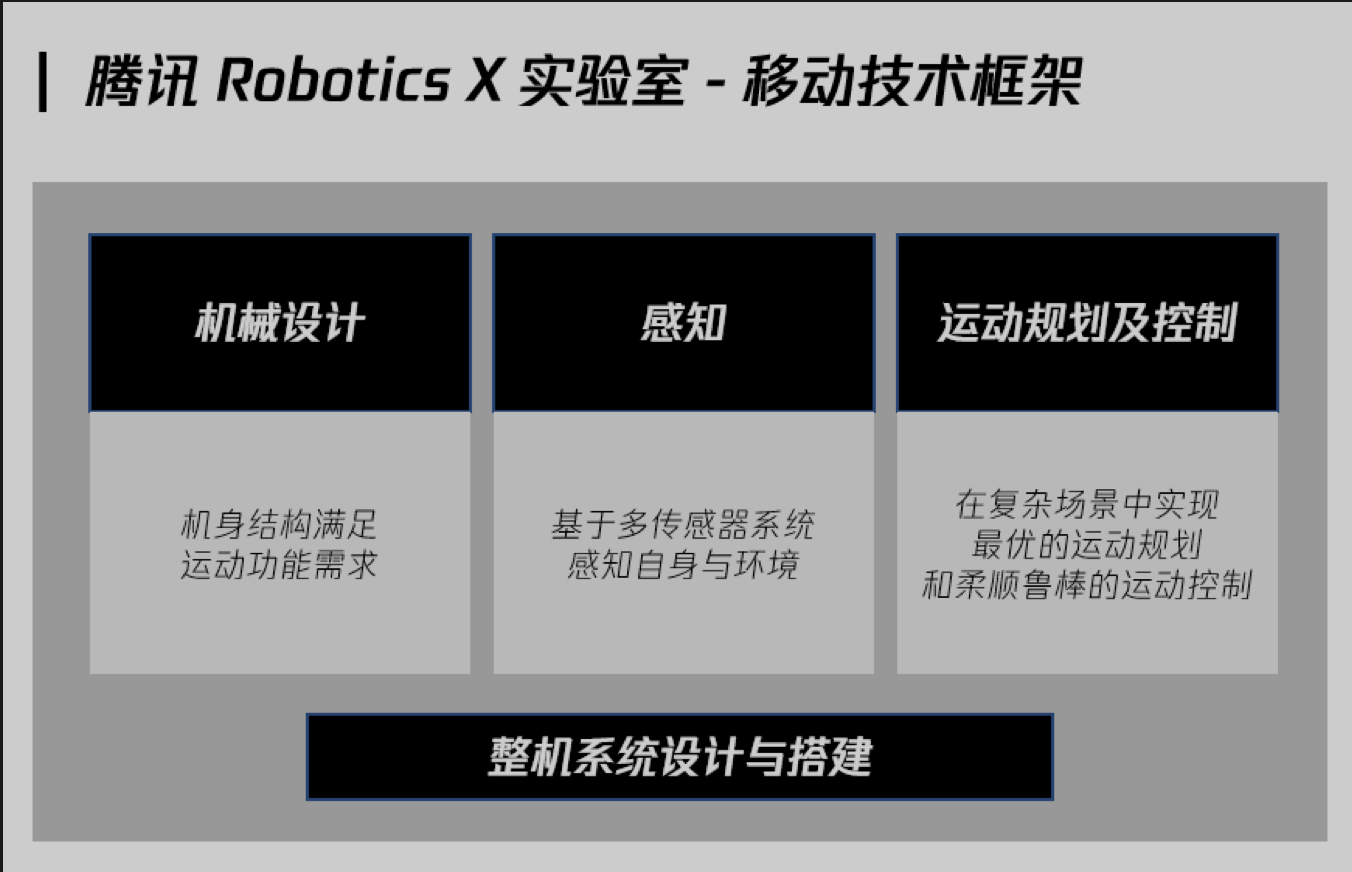
騰訊Robotics X實驗室——移動技術框架
Ollie超強的“輪滑”“空翻”能力就來源於這些器官協調後的結果。在機械設計、整機系統與控制軟體上集成迭代了實驗室技術積累,並重點在運動規劃與控制上突破創新。新增的全身動力學控制與整機參數辨識提升了機器人運動的精準度、靈活度以及柔順性,拓展了實驗室的移動技術佈局。
Ollie 相關研究論文已被 ICRA 2021 收錄,論文介紹了輪腿式機器人平衡控制器的設計思路與實驗結果。ICRA全稱國際機器人與自動化會議(IEEE International Conference on Robotics and Automation),是機器人領域最有影響力的國際學術會議之一。
Ollie 相關研究論文已被 ICRA 2021 收錄
目前Ollie還處於研發階段,實驗室將基於輪腿式機器人平臺的機動性特點,拓展平臺上感知、負載等各功能模組搭建,讓機器人具備更成熟、更豐富的能力。
本次團隊嘗試探索了Ollie的負載能力,兩輪、三輪可以隨意切換,再加上一個機械臂,讓它能夠平穩地端起一杯咖啡,通過輪式移動遞給遠處的客人。

Ollie的負載能力
未來,騰訊 Robotics X實驗室還將在機器人行業做全方位、多領域的探索,向人機共存、共創、共贏的未來不斷邁進。(圖/文 陳東)